- Chinese Core Periodicals
- Chinese Core Journals of Science and Technology
- RCCSE Chinese Authoritative Academic Journals
| Citation: |
CHEN Cheng, SU Chengjie. Energy efficient path planning method for coal mine patrol robot[J]. Safety in Coal Mines, 2024, 55(6): 211−216. DOI: 10.13347/j.cnki.mkaq.20240016

|
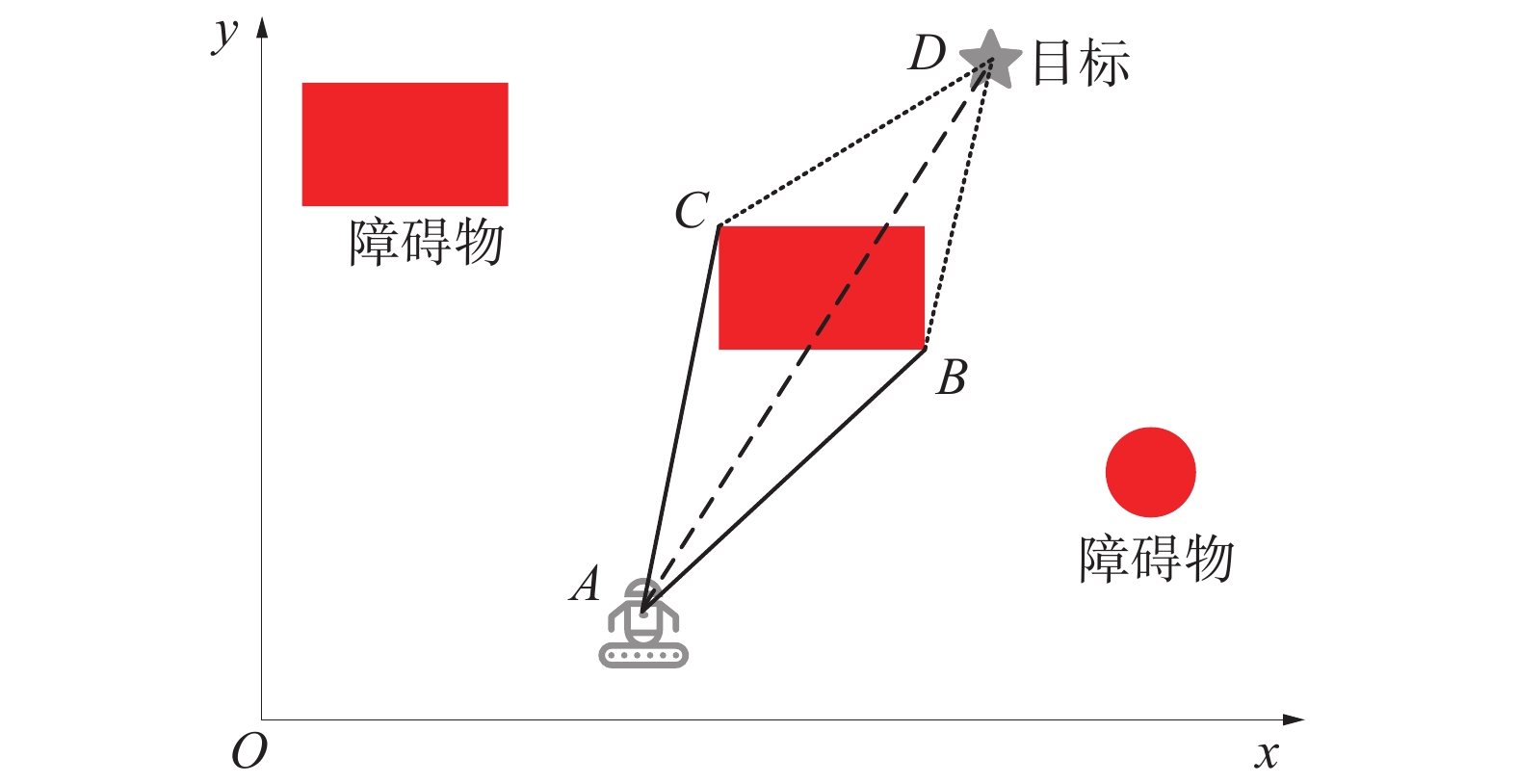
In order to solve the shortcomings of the existing mining robot path planning methods, such as low efficiency, slow convergence speed, and easy to fall into local optimum, a path planning method based on Actor-Critic algorithm is proposed. Firstly, according to the real-time position information of the inspection target and the obstacles, the steering angle of the patrol robot is calculated and the forward direction is determined, which can significantly improve the efficiency of path planning. With the goal of minimizing energy consumption and avoiding collisions, the patrol robot learns the target inspection sequence and forward speed according to the dynamically changing mining environment. Because the dynamic and continuous changes of the mine environment lead to a high state dimension, the action and reward generated by the continuous state are estimated by the deep learning networks. In order to improve the efficiency of learning, two networks are adopted, namely the Actor network and the Critic network, to achieve real-time update of strategy and value. The simulation results show that the proposed method can design a safe and reasonable patrol route in a dynamic environment, and can complete the patrol task with a 98% success probability and lower energy consumption.
| [1] |
葛世荣,胡而已,李允旺. 煤矿机器人技术新进展及新方向[J]. 煤炭学报,2023,48(1):54−73.
GE Shirong, HU Eryi, LI Yunwang. New progress and direction of robot technology in coal mine[J]. Journal of China Coal Society, 2023, 48(1): 54−73.
|
| [2] |
谢春丽,陶天艺,李佳浩. 基于改进人工势场法的路径规划研究[J]. 吉林大学学报(信息科学版),2023,41(6):998−1006.
XIE Chunli, TAO Tianyi, LI Jiahao. Research on path planning based on improved artificial potential field method[J]. Journal of Jilin University(Information Science Edition), 2023, 41(6): 998−1006.
|
| [3] |
倪建云,杜合磊,谷海青,等. 改进人工势场法的移动机器人路径规划研究[J]. 重庆理工大学学报(自然科学),2023,37(11):247−256.
NI Jianyun, DU Helei, GU Haiqing, et al. Improved artificial potential field method for mobile robots path planning study[J]. Journal of Chongqing University of Technology(Nature Science), 2023, 37(11): 247−256.
|
| [4] |
韩金利. 基于改进RRT算法的路径规划研究[J]. 机械工程与自动化,2023,37(11):31−33.
HAN Jinli. Research on path planning based on improved RRT algorithm[J]. Mechanical Engineering and Automation, 2023, 37(11): 31−33.
|
| [5] |
张纳川,王亚飞,章冀辰,等. 面向铲装作业场景的自动驾驶矿车路径规划方法研究[J]. 汽车工程学报,2023,13(1):22−29.
ZHANG Nachuan, WANG Yafei, ZHANG Jichen, et al. Path planning method for autonomous driving mining vehicles in shovel loading operation scenarios[J]. Chinese Journal of Automotive Engineering, 2023, 13(1): 22−29.
|
| [6] |
刘威,储春华,肖明伟. 一种基于时间和路径双重优化的改进A*算法[J]. 制造业自动化,2023,45(12):173−177.
LIU Wei, CHU Chunhua, XIAO Mingwei. An improved A*algorithm based on dual optimization of time and path[J]. Manufacturing Automation, 2023, 45(12): 173−177.
|
| [7] |
刘辉,肖克,王京擘. 基于改进蚁群算法的无人矿车路径规划研究[J]. 制造业自动化,2021,43(4):108−112.
LIU Hui, XIAO Ke, WANG Jingbo. Research on path planning of driverless mining cars based on improved ant colony algorithm[J]. Manufacturing Automation, 2021, 43(4): 108−112.
|
| [8] |
宁竞,龙妍. 改进蚁群算法的煤矿巡检机器人路径规划[J]. 煤炭技术,2023,42(6):235−237.
NING Jing, LONG Yan. Path planning of coal mine patrol robot based on improved ACO algorithm[J]. Coal Technology, 2023, 42(6): 235−237.
|
| [9] |
胡小建,杨智. 基于混合遗传算法的多拣货小车路径规划研究[J]. 合肥工业大学(自然科学版),2022,45(12):1715−1722.
HU Xiaojian, YANG Zhi. Research on path planning of multi picking car based on hybrid genetic algorithm[J]. Journal of Hefei University of Technology(Natural Science), 2022, 45(12): 1715−1722.
|
| [10] |
王龙宝,栾茵琪,徐亮,等. 基于动态簇粒子群优化的无人机集群路径规划方法[J]. 计算机应用,2023,43(12):3816−3823.
WANG Longbao, LUAN Yinqi, XU Liang, et al. Route planning method of UAV swarm based on dynamic cluster particle swarm optimization[J]. Journal of Computer Applications, 2023, 43(12): 3816−3823.
|
| [11] |
吴东领,魏群,刘心军. 面向煤矿救援机器人路径规划的重回放机制DQN算法[J]. 煤炭技术,2023,42(5):237−240.
WU Dongling, WEI Qun, LIU Xinjun. Replay mechanism DQN algorithm for path planning of coal mine rescue robots[J]. Coal Technology, 2023, 42(5): 237−240.
|
| [1] | WEN Tianfei, GAO Yu, WANG Quan, YANG Chuang. Key technologies for path planning of coal mine wheeled robots integrating fast traversal random trees and Q-reinforcement learning[J]. Safety in Coal Mines, 2025, 56(3): 233-241. DOI: 10.13347/j.cnki.mkaq.20241415 |
| [2] | LU Shouqing, LI Mingjie, SI Shufang, SA Zhanyou, LIU Jie, WANG Chengfeng, BEI Taibiao, SHI Jiang. Analysis of outburst instability tendency of coal containing methane based on energy theory[J]. Safety in Coal Mines, 2022, 53(10): 105-111. |
| [3] | Control method and system design for power saving and power consumption reduction of gamma LWD probe tube[J]. Safety in Coal Mines, 2022, 53(1): 161-166. |
| [4] | ZHOU Daiyong. Wind-induced vibration piezoelectric energy harvesting technology in underground mine[J]. Safety in Coal Mines, 2021, 52(9): 153-156. |
| [5] | DONG Jianguo, LI Yanmin, ZHOU Xingdong, ZHANG Lei. Several Methods of Reducing Discharge Energy for Intrinsic Safety Power Supply[J]. Safety in Coal Mines, 2020, 51(3): 97-99. |
| [6] | ZHOU Min, SHENG Tong, ZHU Fang, GAO Wen. Dynamic Relationship Between Carbon Emission and Economic Growth in China’s Energy Consumption[J]. Safety in Coal Mines, 2018, 49(5): 253-256. |
| [7] | CUI Rui, CHENG Wuyi. Influence of Ignition Energy on Explosion Behavior of Pulverized Coal[J]. Safety in Coal Mines, 2017, 48(4): 16-19. |
| [8] | CHEN Quan, SHI Xuan. Application of Energy Source Analysis in Safety Risk Identification of Coal Mine[J]. Safety in Coal Mines, 2016, 47(6): 240-242,246. |
| [9] | LI Wentao, ZHAO Jianzhong, GUO Boting. Energy Consumption Analysis of Separating Technology for Low Concentration Mine Gas Hydrate[J]. Safety in Coal Mines, 2015, 46(12): 188-191. |
| [10] | FENG Xiao-jun, SHEN Rong-xi, CAO Xin-qi, WEI Ming-yao. Analysis of Hard Roof Fracture and Energy Conversion[J]. Safety in Coal Mines, 2012, 43(4): 150-153. |
| 1. |
朱翠,罗宇豪,王占刚,戴娟. 新型蚁群算法规划核电厂巡检机器人路径. 核电子学与探测技术. 2025(01): 107-115 .

|
Supported by: Beijing Renhe Information Technology Co., Ltd. 
 DownLoad:
DownLoad: