
Pain points and intelligent classification standards for coal mine robot technology industry
-
摘要:
探讨了我国煤矿机器人行业的发展现状、痛点以及未来趋势。在“机器人+”大时代背景下,从机器人企业数量、地域分布、产业园区建设、优势赛道、国家政策等层面阐述了我国机器人产业发展情况,并阐述国内互联网和制造业大厂入局机器人带来的变革与挑战;重点分析了煤矿机器人技术及产业痛点,指出了煤矿机器人实现智能化应具备的3大能力;提出了应加强其供应链、标准体系等方面建设;详细介绍了煤矿机器人L0~L5的分级标准。
Abstract:This paper mainly discusses the development status, pain points and future trend of China’s coal mine robot industry. In the context of the “robot +” era, this paper expounds the development of China’s robot industry from the aspects of the number of robot enterprises, regional distribution, industrial park construction, advantage track, national policy, etc., and expounds the changes and challenges brought by the domestic Internet and manufacturing enterprises. This paper focuses on the analysis of coal mine robot technology and industry pain points, and extracts three major capabilities that coal mine robot should have to realize intelligence. Strengthening the construction of supply chain and standard system is proposed. The classification standard of coal mine robot L0-L5 is introduced in detail.
-
机器人被誉为是“制造业皇冠顶端的明珠”,其研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志,已成为全球新一轮科技和产业革命的重要切入点。机器人目前可分为工业机器人、服务机器人和特种机器人3类:工业机器人已经成为生产线上不可或缺的一员;服务机器人则是人工智能技术在服务业的典型应用;特种机器人则代表了机器人技术在极端环境下的应用。机器人的研发与应用不但体现了人类使用工具的进步,也是与当代最前沿科技结合成果的集中表现。一直处于创新应用前沿的新材料、复杂机械、电气技术、电子技术、信息技术、人工智能等相关技术,都将与机器人紧密融合,为机器人领域提供了无限可能,为人类工作生活带来极大便利,也为人类带来前所未有的生产力和生活体验。煤矿机器人作为特种机器人的一种,应用环境更恶劣、任务更复杂随机,离散化特征明显,智能化需求边界更加广泛,研发难度更大,技术与产业方面仍存在一定痛点。王国法院士在煤矿智能化十大“痛点”解析及对策中指出,煤矿机器人基础共性关键技术存在诸多“瓶颈”,如机器人动力驱动、可靠行走机构、高效精准定位等相关技术尚未突破[1];葛世荣院士通过对煤矿机器人体系及关键技术的研究梳理,在阐明煤矿机器人共性关键技术同时,指明了煤矿机器人必须专注于卡脖子技术研发,提高产品质量[2]。
基于此,我国在煤矿机器人领域需深度剖析场景特征,突破关键核心技术,实现产品智能化开发的同时;还需要在技术创新、产业协同等方面,进行更深入的研究和探索。
1. 机器人领域发展现状
“机器人+”大时代加速来临,当前正处于机器人技术爆发期。分析全球及中国机器人市场规模及增长率发现,从2018年到2022年,机器人市场规模不断增大[3]。其中,工业机器人市场逐年稳步增长,增速平稳,一直是机器人行业发展最快的领域;服务机器人存在巨大市场潜力及发展空间,由于消费者需求逐步增多,未来规模有望迎来爆发式增长;特种机器人因为能为其他行业带来颠覆性变革,将成为国内机器人未来发展的重中之重。
1.1 我国机器人产业发展情况
机器人领域同样是我国竞争程度最为激烈的技术高地,机器人产业发展势头猛烈,参与者众多。机器人企业数量增速较快,从整个产业发展的情况来看,超8成的机器人相关企业成立于5年内。从地域分布看,以广东、江苏及山东省机器人企业数量最多,深圳作为国内机器人产业的核心聚集地之一,相关企业有3.07万家。服务机器人是当前热点,国内初创企业接近4成比例选择从服务机器人的整机系统集成赛道进入行业[4-7]。
机器人产业园区对于打造智能制造产业集群、推动产业发展有着重要意义,更是地区科技发展强弱的体现之一。我国机器人产业园区多分布在长三角、珠三角和京津冀地区,具有代表性的产业园区有昆山高新区机器人产业园、上海机器人产业园、南山机器人产业园、宝安机器人制造产业园、中关村机器人产业创新中心等,优势赛道多为核心零部件、人工智能方面。东北、中部以及西部地区产业园区分布较少。
机器人领域发展已上升为国家战略,各政策明确提出要把机器人作为重点科技项目推进,清晰指向机器人与行业深度融合。近5年,中央各部委密集连续发文,综合及专项性政策数量约为20个,指向用机器人智能化、无人化改造传统行业。特别是2023年1月份,由工信部、发改委等17部门联合发布的《“机器人+”应用行动实施方案》。在方案中提出了机器人与制造业、农业、建筑、能源、医疗、安全应急和极限环境应用等10大产业融合的规划,由此可见,深化各个行业领域“机器人+”应用是机器人发展趋势。从传统行业改造优先级来看,煤炭、有色金属、非金属矿山等事关国家能源安全且作业风险大、强度高的行业排名靠前。目前,“机器人+”已经逐步在10大产业落地应用,开发的机器人产品超200个种类,需求愈发广泛。
“机器人+场景”的深度应用,既是机器人发展的重要方向,也是各行业智能化发展的重要方向。在此基础上,“机器人+”各行业的组织、方阵或联盟应运而生,近2年约有8个相关组织成立。其中的典型代表是于2023年3月24日在深圳成立的中国“机器人+矿山”产业协同推进方阵,推动了机器人与煤炭行业深度融合。
1.2 国内互联网和制造业大厂入局机器人情况
国内科技型企业入局机器人情况见表1。
表 1 国内科技型企业入局机器人情况Table 1. Inbound robot situation of domestic scientific and technological enterprises企业名称 布局时间 布局领域 海康 2016年 出海康机器人,主要从事工业机器人产业中的机器视觉与移动机器人 京东 2016年 无人机、AGV、机器人搬运装备、智能服务机器人 阿里巴巴 2019年 智能物流机器人 美团 2019年 无人配送车 华为 2017年 发布矿山、气象、海浪等系列盘古行业大模型 腾讯 2018年 成立机器人实验室Robotics X 字节跳动 2020年 探索把 AI 大模型能力用到机器人上 网易 2017年 智能机器人研发销售、人工智能硬件销售及软件开发 立讯精密 2021年 智能机器人的研发销售 纵观国内机器人行业变化可以发现,中国10余家最具代表性的科技型公司都已经纷纷踏入机器人领域。华为、腾讯、字节跳动等都在大模型及算法方面布局,去支撑“AI + 行业”;由海康威视拆分出海康机器人公司,主要从事工业机器人产业中的机器视觉与移动机器人部分。互联网和制造业大厂纷纷布局机器人、进军新赛道,都将大模型、AI等与机器人的结合放在了非常关键的位置,以获得新领域的技术优势,利用新产品的开发、新产业的发展,获得新的增长空间;提高原有产品和产业的竞争力,加宽加深建立护城河,进一步做大做强主业。
综上,在当前形势下,也需要煤炭行业的相关企业一起来深度思考,煤矿机器人产业到底应该如何发展。思考背后的原因不难发现,各大厂的入局,能够证明这种做法有利于原有产业生态发展,形成核心竞争力,形成新的产品线;同时,将云技术、AI人工智能技术等与机器人的结合,将带来新的价值链、技术、架构、体验和新商业模式;更重要的是,说明了机器人本身的技术正逐步走向成熟,能够颠覆传统技术,融合到行业中去实现载体作用,以实现现实世界与物理世界的交互。由此可见,“机器人+AI+云”是煤矿机器人发展不断满足应用场景需求复杂化的必然趋势,将能够快速拉动煤炭行业和相关机器人技术的发展,为煤矿机器人的落地应用缔造更多的拓展空间,也为制造业的提升起到了良好的推动作用。
2. 煤矿机器人技术及产业痛点
机器人的发展经历了长久的迭代才形成现在大家所熟知的机器人技术脉络和产业体系。机器人3大类中,从工业机器人到服务机器人再到特种机器人,应用环境复杂程度、智能化需求以及研发难度都是逐渐加强的。工业机器人成熟度高,基于良好的作业环境和任务特征,能够实现规模化应用;服务机器人技术难度较大,基于环境特性的智能化程度和抗干扰性方面的要求也更高;相较于工业机器人和服务机器人,特种机器人应用环境更恶劣,多为高温、爆炸、粉尘等极限环境,技术难度更大。其背后的逻辑是环境的复杂性和任务的离散性的增加导致研发难度的递增。
煤矿机器人作为特种机器人的典型代表,在我国已有相关研发生产厂家65家,具有代表性厂家有中煤科工机器人有限公司、中煤科工集团沈阳研究院、中信重工开诚智能装备有限公司、山西戴德测控技术股份有限公司等。按照2019年国家煤矿安全监察局发布的《煤矿机器人重点研发目录》中5大类38种煤矿机器人统计,虽然已有31种实现了应用,但也暴露出一定的问题,机器人可靠性和功能性都不能满足煤矿用户的实际需求,导致煤矿用户及外界人士认为煤矿机器人用途不大,甚至是没有意义的,严重影响了整个行业的发展[8]。
2.1 煤矿机器人技术痛点
煤矿机器人技术由共性技术和工艺性技术2部分组成。共性技术主要包括防爆轻量化、智能感知识别、导航等技术;工艺性技术则是面向煤矿典型环境特征与作业工艺任务特征的作业流程工艺机器人化。按照中煤科工机器人公司提出的煤矿机器人技术装备分类标准体系,分别对巡检类、辅助作业类和救援类3大类煤矿机器人进行痛点剖析。
1)巡检类机器人痛点。目前巡检机器人在使用过程中反映出了大量问题,从其表象来看,主要包括:不能完全替代人工巡检、部分巡检功能缺失、机器人续航时间短、检测数据准确率较低、需要人工查询巡检记录、机器人断网条件下无法连续工作、不能打开电控柜检测内部数据、与人员交互能力差等方面[9-10]。造成以上问题的原因可归纳为2方面:①应用场景的环境复杂程度高,比如低光照条件下造成的仪表识别难度大,高粉尘环境造成的摄像头积尘严重导致识别效果差,带式输送机、电控柜等设备限制了巡检空间的大小,对机器人本体机构提出更高要求;②机器人自身可靠性和智能化水平不足,比如单电芯BMS管理系统可靠性差导致的续航能力弱,场景发生变化后算法模型适配有差异而不能及时调整导致的行走能力弱,上位机界面不友好、自身维护繁琐导致的不能融入客户管理系统,关键传感单元缺失、与场景融合视觉识别、声音识别等能力弱导致的自诊断能力差。因此,巡检类煤矿机器人最大痛点是AI 技术难以满足场景化应用,不能实现自分析、自决策。需要提升机器人本体AI能力和关键元器件的研发能力,进一步优化和开发适用于煤矿机器人应用特征的控制逻辑与算法,以提升机器人的自我感知和交互能力。
2)辅助作业类机器人痛点。辅助作业类机器人是替代煤矿人工非连续作业的根本途径,是实现全矿井智能化必须攻克的“技术高地”,对减少井下危险作业岗位、降低人员劳动强度具有决定性支撑作用[11]。辅助作业机器人受限于高粉尘、低照度、GPS拒止、非结构化地形的环境特征,以及作业对象重载荷、连续作业时间长、标准化程度低的作业特征,应用过程中存在大量痛点问题。呈现出的表象问题就是作业效果不理想,不能完全自主作业,不能完全替代某一工序下全部人工,减员增效效果一般。可将当前存在的痛点问题归纳为4个方面:①机器人缺少严格的测试体系和测试场地,导致机器人即使在规定的工步下其执行机构和行走机构的自身可靠性也较低,在未知的非结构环境下也不能实现连续行走;②机器人与环境的交互能力弱,如抓管机器人,在设定的工艺流程下,若管路放置位置改变,机械臂路径并不能随之变化;③运动及作业能力差,机器人多为重载履带底盘,其自主行走还存在移动偏移误差大、定位精确程度不高的问题;④控制精度较低,不能实现“机器人+场景+工艺/工序”的精细化仿人控制,如喷浆机器人的喷浆厚度一致性检测准确率低,依然需要人工参与。因此,煤矿辅助作业类机器人的最大痛点是场景聚焦后作业工艺流程复杂导致的“机器人+场景”下的技术开发难度大。目前需要提升产品应用连续性,不断迭代机器人应用工艺的时效性,将技术攻关解耦到每个工艺流程,实现工艺流程的自动衔接,提升整机作业效果。
3)救援类机器人痛点。不同于巡检、作业类机器人,救援类机器人适用于事故灾害现场[12-13],未知、狭小等复杂空间决定了机器人需具备良好的本体适应性和通过性。目前救援类机器人存在的主要问题仍表现在机器人本体结构上,如体积较大、驱动能力不足、灵活性较差等;另一痛点是机器人难以保障有效通信,通信信号受到灾后环境干扰,机器人应用救援距离有限,如何增加中继系统、保证通信信号稳定、可靠是救援机器人的难点。救援类机器人应用场景主要面向水、火、瓦斯、顶板等灾后非结构化、狭小空间环境,受限于小型化、轻量化防爆结构,灾后通信重构、多形态变换驱动及运控等技术难题,研发与应用进展缓慢,易用性上远远达不到客户预期。
综上,煤矿机器人存在的技术痛点最终反应为3大能力的缺失:①机器人本体对于区域作业场景下快速建图及规划能力;②与应用场景的交互能力;③机器人融入新环境后面向数据特征形成新的运行与作业能力。这3种能力是煤矿机器人可靠性和智能化水平的重要体现。
2.2 煤矿机器人产业痛点
煤矿机器人产业是重投入、高利润的技术、服务、供应链、资金密集型产业。从行业现状看,共性技术供给能力不足、产品研发支撑能力不足、品质持续提升能力不足及产品应用和保障能力不足是造成产品研发进展缓慢的根本原因[14-15]。
供应链建设是煤矿机器人产业发展的基础。但由于上下游企业之间信息不对称,供应链的效率低下,导致其产品研发进度缓慢,难以实现有效资源配置利用。直接造成供应商的质量控制和交货时间不稳定,机器人研发成本过高,给煤矿机器人的生产和使用带来了一定的风险,供应链的不通畅,严重阻碍煤矿机器人的普及和应用。解决这些问题的关键是要加强供应链上中下游企业之间的合作共识与信息共享,下游提出需求、中游响应需求、上游提供可靠支撑,才能做到整个供应链的顺畅交互, 提高效率、降低成本,促进煤矿机器人产业快速发展。
标准体系建设是煤矿机器人产业健康发展的关键。目前,煤矿机器人行业的标准体系还不够完善,缺乏统一的标准和规范,导致产品质量和安全可靠性难以保证。此外,由于缺乏标准,煤矿机器人在使用过程中也存在数据接口方式繁杂、不能接入煤矿客户管理系统等一些问题,不同品牌的产品也不能互相替换,导致使用成本增加。为适应行业发展需要,必须从产品标准、测试方法、安全规范等方面进行统一的规范与约束,提高行业对标准的认知度和遵守度,从根本上推动煤矿机器人产业健康有序发展。
检验检测平台建设是煤矿机器人产业发展的必要条件。目前,煤矿机器人行业的检验检测平台数量较少,检测能力有限,大部分产品只能直接在井下调试,调试周期长,不但产品使用风险难以控制,也为客户带来了不好的印象。建立检验检测平台及完善的检测体系,能够为机器人提供准确数据支撑,大幅提升煤矿机器人产品质量,保障煤矿机器人新兴产业科学发展。
产学研用协同建设是煤矿机器人产业发展的重要支撑。目前,“机器人+矿山”产业应用协同方阵刚刚成立,煤矿机器人行业的产学研用协同程度依然处于初级水平,产学研用协同建设仍面临诸多挑战。技术研发和实际应用之间存在鸿沟,科研成转化为实际生产力还需要大量的验证和迭代,需要通过各方共同努力,才能推动煤矿机器人产业不断向前发展。
综上,煤矿机器人产业在供应链建设、标准体系建设、检验检测平台建设和产学研用协同建设方面都存在一定痛点。煤矿机器人作为“机器人+矿山”的全新技术领域,其迭代升级与不断演进都需要时间。
3. 煤矿机器人分级标准
机器人进入到煤矿行业应用后,由于其任务不固定和环境极端复杂性,并不能简单地以单一维度的标准来评定其价值和功能的强弱。煤矿机器人应用场景多元,粉尘浓度、温度、地质条件、空间大小等影响因素众多,不能以简单地好用或不好用来评判煤矿机器人的意义和价值。尤其是发展到AI时代后,可以赋予机器人无限的功能,其好用与否就更不能简单地以好用或不好用来评价。因此,在充分调研当前研发和应用现状后,提出煤矿机器人分级标准,旨在为国内煤矿机器人研发厂家和煤矿企业提供通用语境,促进行业科学发展。
煤矿机器人等级划分见表2。
表 2 煤矿机器人等级划分Table 2. Classification of coal mine robots分级 L0 L1 L2 L3 L4 L5 定义 不具备智能化
功能人工干预下辅助作业 特定条件下的连续自动作业 环境友好条件下的半自主作业 目标物规则清晰下的全自主作业 完全自主作业 释义 完全由人工操作机器人,没有任何智能系统干预情况下执行所有巡检或辅助作业任务,运动机构仅适用于良好
环境。机器人可实现人工远程操作,具备环境感知、数据采集、辅助判断等
功能。在路径固定、检测目标固定、执行任务固定时,机器人按照示教形成固定作业模式,在特定范围连续自动作业。 场景特征明显、光照度较为良好情况下,能够实现自主导航、路径规划、智能识别、数据分析;依然由人工通过上位机进行关键工序的远程干预。 仅能够面向静态及规则清晰运动对象的完全自主运行,实现自分析、自
决策。能够进入到采空区、掘进工作面等高难度场景,能够完全实现自行走、自分析、自诊断、自决策、自作业,实现环境及机器人群之间交互,协同作业。 主体 操作 人工 人工/系统 人工/系统 人工/系统 系统 系统 决策 人工 人工 人工/系统 人工/系统 系统 系统 系统作用域 无 部分 部分 部分 部分 全部 将煤矿机器人划分为6个级别,从感知、决策、控制等方面进行综合评价。从L0到L5,煤矿机器人将从完全不具备机器人的特性、到人工干预下的辅助作业、到特定场景下连续性自动作业、到环境友好条件下半自主以及目标规则清晰条件的全自主,最终实现完全自主作业,其中L0为最低级,完全需要由人工参与;L5为最高级,智能化程度最高。
按照以上等级划分情况来看,煤矿机器人行业整体处于L1~L2阶段;其中,纯巡检类机器人处于L3阶段,巡检作业一体化类别机器人处于L2阶段,辅助作业类机器人属于L1阶段。由此可见,煤矿机器人发展仍处于初级阶段,大量关键技术需要攻关、多类应用场景可靠性需要提升,解决共性技术、核心零部件、核心软件算法等“卡脖子”技术后,煤矿机器人将有望进入到L4~L5阶段,目前行业内也正在努力攻克堵点卡点难题,拓展煤矿机器人能力边界。
3.1 L0——无智能化
设备在没有任何智能系统干预的情况下执行所有作业任务,完全由人工操作机器人,动作模式较为固定,作业流程不复杂,人工控制简单易操作,这样煤矿机械装备可认为是L0级。
以传统钻机为例,钻机的主要工作流程包括旋转钻杆、推进钻杆和冲洗孔道3个步骤。传统钻机工艺流程如图1。
钻机通过主机提供的动力,将旋转力传递到钻杆上,钻杆的旋转力作用于钻头,使钻头能够在地下旋转,从而打碎岩石或土壤;再通过液压系统的推进装置,将推进力传递到钻杆上,推进力使钻杆能够向地下推进,推进钻头进入地下;最后通过液压系统的冲洗装置,将冲洗液体送入钻杆内部,冲洗液体通过钻杆内部的孔道,将地下的碎石或土壤冲刷到地面上。打钻过程中的每个步骤都需要人工的参与,在上下钻杆、运水、平安动态检测等重要工步需要多人同时负责。钻机的行走也由人工驾驶控制,不具备遥控功能。
3.2 L1——感知支撑
处于L1级表示机器人可以具备环境感知、数据采集、辅助判断等功能,但具体行走、动作等还需要人工参与操作和控制。目前已经研制出的辅助作业类机器人基本处于L1阶段。
以管路安装机器人为例,其应用场景为煤矿井下巷道。管路安装机器人工艺流程如图2。
井下作业环境复杂,管道摆放随机,管路安装机器人无固定作业流程及规划,执行循环作业困难。运输车将管路运送到巷道内,由人工进行搬运、摆放至巷道地面后,操作人员遥控机器人行走至作业区域,机器人停车后,人员遥控机械臂抓取地面上的管路并举升至安装位置,再由人工进行放置托架,并进行精准的位置调整后完成对孔连接,整个流程需要4~6人参与。
3.3 L2——部分智能化
处于L2级的机器人能够实现在路径固定、检测目标固定、执行任务固定时,机器人按照示教形成固定作业模式,在特定范围连续自动作业。
以煤矿井下带式输送机挂轨式巡检机器人为例,带式输送机巡检机器人工艺流程如图3。
机器人能够在轨道上往复行走,巡检任务固定,通过搭载对应传感器与识别算法,实现输送带撕裂、跑偏、异物等进行识别检测。
轨道式巡检机器人可实现在轨道这一特定范围内的连续作业,虽然是针对特定场景部分智能化,但L2等级的实现标志着煤矿机器人在智能化水平上的重大突破。
3.4 L3——有条件智能化
处于L3级的机器人在场景特征明显、光照度较为良好情况下,能够实现自主导航、路径规划、智能识别、数据分析,但依然由人工通过上位机进行关键工序的远程干预。
以变电所轮式巡检机器人为例,变电所巡检机器人工艺流程如图4。
煤矿井下变电所环境相对较好,设备摆放位置固定,路况特征良好,光照较为明亮,巡检内容固定,机器人可以自主行走避障,实时监控变电所内设备的运行状态及表面温度,自动记录设备显示屏上仪表显示的数值、开关状态、指示灯状态,采集变电所内的温湿度、烟雾、多种气体浓度参数等信息,将数字化的图像、声音和准确的数据实时归类存储,可有效代替人工实现对设备及仪表的巡检。
3.5 L4——高度智能化
处于L4级的机器人能够面向静态及规则清晰的运动对象时完全自主运行,实现自感知、自分析、自决策。
以中煤科工机器人科技有限公司全新研发的变电所扫拖一体化巡检作业机器人为例。
变电所内行走路径固定,巡检和作业目标处于静止状态,整体作业任务规范,机器人可实现按钮按压旋转精准操作、仪表识别、气体检测、自主导航避障等功能,在变电所遇到紧急情况需要急停时,通过自主分析决策,还可实现急停按钮按压,解决突发情况人员无法及时处置的难题。
该机器人上应用了大量AI技术,Loam算法与双光柱联合定位方法技术、基于模糊识别的状态感知技术、基于断网续存技术等,实现机器人移动状态下的地图快速构建、目标对象精准感知识别,并且通过高强度算力与算法实现机器人自分析、自决策,使机器人自身具备大脑思考能力,本体智能化水平大大增强,促进煤矿机器人走向更加复合性、功能化的应用。
3.6 L5——完全智能化
机器人达到L5级,单体智能程度更高,能够完全实现自行走、自分析、自诊断、自决策、自作业;且对环境适应能力更强,能够进入到采空区、掘进工作面等高难度场景;可实现机器人-机器人之间、机器人-环境之间的多元交互,煤矿机器人群可统一运维、协同作业。
以喷浆机器人为例,井下喷浆机器人作业流程如图5。
当机器人达到L5级时,机器人可实现自主上料、搅拌、传送物料,自主规划行走路线后进行自主移机,到达喷浆位置时自主停车,对巷道进行三维建模后自主生产喷浆路径,机械臂完成喷浆后再次建模进行喷浆质量检测,喷浆质量达到标准后自主移机到下一喷浆点位,此为完成1个工艺流程。机器人自身算力可支撑每一工步的数据分析与诊断,实现全流程数据管理。
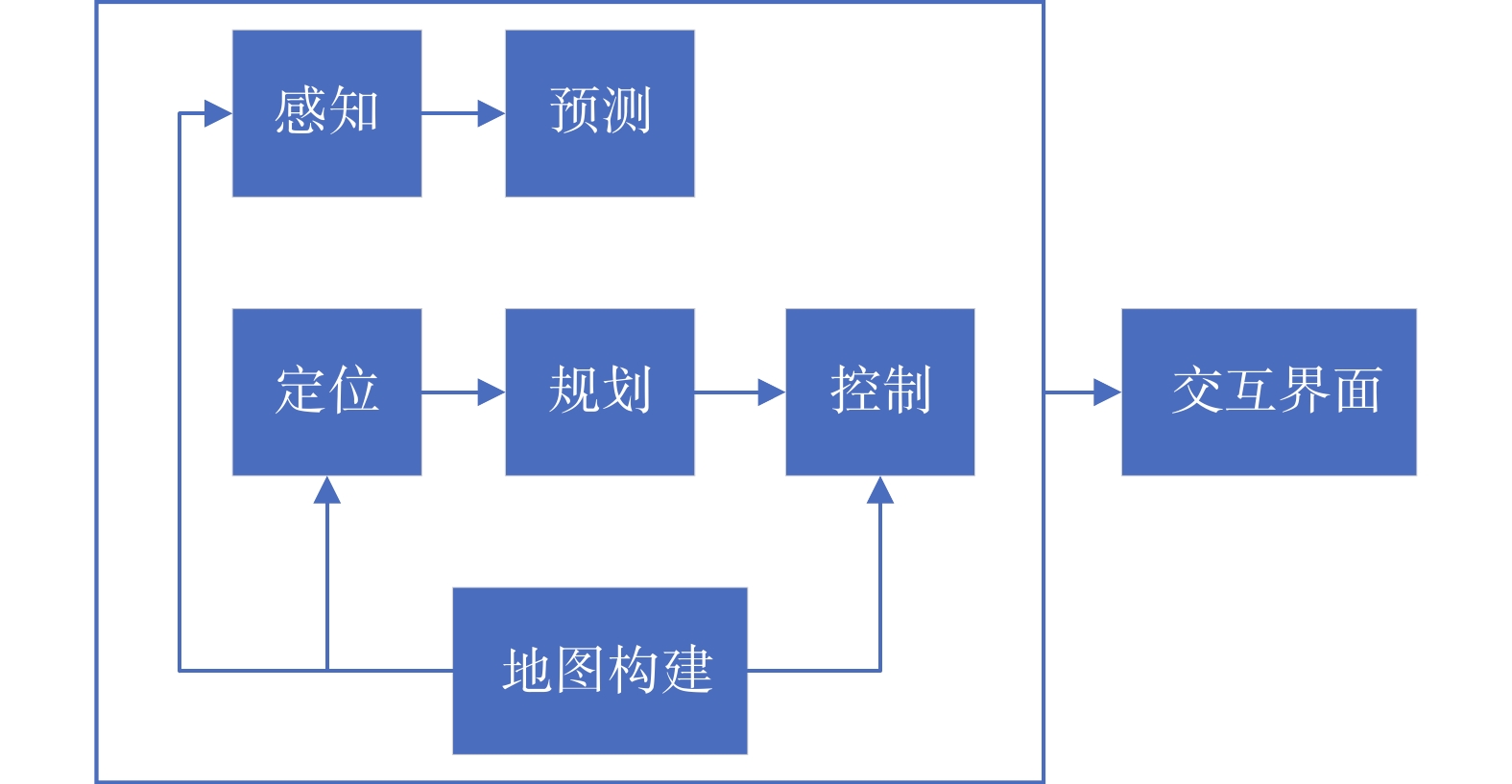
由此可以得出,机器人实用、好用、能用的必要条件必然是将感知层、决策层和控制层打通,感知层收集大量的机器人自身和环境数据,决策层通过算法、算力等流畅地处理这些数据以保证系统及时做出正确的决策,从而为控制层提供指令。最终的自主作业流程架构如图6。
煤矿机器人分级标准的建立,能够更准确地帮助客户在不同场景和不同环境下提出差异化的功能需求,为机器人生产制造企业面对不同产品业务需求时提供等级参照;促进研发端和用户端形成统一语境,实现认知链路畅通,进一步助力供应链顺畅交互,产业快速发展。
4. 结 语
分析整个煤矿机器人行业发展,其在科技创新、现场应用、产业孵化等方面面临着很多困难,使用端和供应端存在认知差异的问题一直困扰着整个行业;大家也容易陷入将目前成熟的工业机器人智能化水平直接定义到煤矿机器人上的误区。煤矿机器人的应用环境非结构化程度高,工艺和工序的可复制化程度低,因此评价煤矿机器人是否好用,需要将机器人置于煤矿行业背景下,遵从技术变迁与场景变迁综合来看。煤矿机器人分级标准的建立,将增强机器人制造与使用相结合的紧密程度,帮助行业认识到煤矿机器人产品规律,有利于煤矿机器人技术的不断创新和进步,从而提高机器人的实用性与可靠性,助推煤矿机器人产业稳步发展。
-
表 1 国内科技型企业入局机器人情况
Table 1 Inbound robot situation of domestic scientific and technological enterprises
企业名称 布局时间 布局领域 海康 2016年 出海康机器人,主要从事工业机器人产业中的机器视觉与移动机器人 京东 2016年 无人机、AGV、机器人搬运装备、智能服务机器人 阿里巴巴 2019年 智能物流机器人 美团 2019年 无人配送车 华为 2017年 发布矿山、气象、海浪等系列盘古行业大模型 腾讯 2018年 成立机器人实验室Robotics X 字节跳动 2020年 探索把 AI 大模型能力用到机器人上 网易 2017年 智能机器人研发销售、人工智能硬件销售及软件开发 立讯精密 2021年 智能机器人的研发销售  下载: 导出CSV
下载: 导出CSV
表 2 煤矿机器人等级划分
Table 2 Classification of coal mine robots
分级 L0 L1 L2 L3 L4 L5 定义 不具备智能化
功能人工干预下辅助作业 特定条件下的连续自动作业 环境友好条件下的半自主作业 目标物规则清晰下的全自主作业 完全自主作业 释义 完全由人工操作机器人,没有任何智能系统干预情况下执行所有巡检或辅助作业任务,运动机构仅适用于良好
环境。机器人可实现人工远程操作,具备环境感知、数据采集、辅助判断等
功能。在路径固定、检测目标固定、执行任务固定时,机器人按照示教形成固定作业模式,在特定范围连续自动作业。 场景特征明显、光照度较为良好情况下,能够实现自主导航、路径规划、智能识别、数据分析;依然由人工通过上位机进行关键工序的远程干预。 仅能够面向静态及规则清晰运动对象的完全自主运行,实现自分析、自
决策。能够进入到采空区、掘进工作面等高难度场景,能够完全实现自行走、自分析、自诊断、自决策、自作业,实现环境及机器人群之间交互,协同作业。 主体 操作 人工 人工/系统 人工/系统 人工/系统 系统 系统 决策 人工 人工 人工/系统 人工/系统 系统 系统 系统作用域 无 部分 部分 部分 部分 全部
下载: 导出CSV
-
[1] 王国法. 煤矿智能化十大“痛点”解析及对策[J]. 智能矿山,2021,2(3):1−4. [2] 葛世荣,胡而已,裴文良. 煤矿机器人体系及关键技术[J]. 煤炭学报,2020,45(1):455−463. GE Shirong, HU Eryi, PEI Wenliang. Classification system and key technology of coal mine robot[J]. Journal of China Coal Society, 2020, 45(1): 455−463.
[3] 陶永,刘海涛,王田苗,等. 我国服务机器人技术研究进展与产业化发展趋势[J]. 机械工程学报,2022,58(18):56−74. doi: 10.3901/JME.2022.18.056 TAO Yong, LIU Haitao, WANG Tianmiao, et al. Research progress and industrialization development trend of Chinese service robot[J]. Journal of Mechanical Engineering, 2022, 58(18): 56−74. doi: 10.3901/JME.2022.18.056
[4] 史昊天,黄春晓. 深圳市机器人产业发展模式与集聚特征研究[J]. 科技管理研究,2021,41(19):161−168. SHI Haotian, HUANG Chunxiao. Research on development mode and agglomeration characteristics of Shenzhen robot industry[J]. Science and Technology Management Research, 2021, 41(19): 161−168.
[5] QIAN L. Discussion on Driving Factors of Robotics Industry Development: A Supply Chain Perspective[J]. Engineering Advances, 2023, 3(2): 93−96. doi: 10.26855/ea.2023.04.003
[6] 张艾莉,孙新宇. 产业协同集聚、工业机器人应用与技术创新[J]. 中国科技论坛,2023(8):51−61. ZHANG Aili, SUN Xinyu. Synergetic agglomeration of industries, the application of industrial robots and technological innovation[J]. Forum on Science and Technology in China, 2023(8): 51−61.
[7] 王雷. 煤矿机器人技术装备及产业发展应用实践与思考[J]. 智能矿山,2023,4(9):7−14. [8] 葛世荣,胡而已,李允旺. 煤矿机器人技术新进展及新方向[J]. 煤炭学报,2023,48(1):54−73. GE Shirong, HU Eryi, LI Yunwang. New progress and direction of robot technology in coal mine[J]. Journal of China Coal Society, 2023, 48(1): 54−73.
[9] 毛浩,薛忠新,范生军,等. 张家峁煤矿回风巷道智能巡检机器人系统[J]. 煤矿安全,2021,52(7):107−111. MAO Hao, XUE Zhongxin, FAN Shengjun, et al. Intelligent inspection robot system for return air roadway in Zhangjiamao Coal Mine[J]. Safety in Coal Mines, 2021, 52(7): 107−111.
[10] 董志华,姚顽强,蔺小虎,等. 煤矿井下顾及特征点动态提取的激光SLAM算法研究[J]. 煤矿安全,2023,54(8):241−246. DONG Zhihua, YAO Wanqiang, LIN Xiaohu, et al. LiDAR SLAM algorithm considering dynamic extraction of feature points in underground coal mine[J]. Safety in Coal Mines, 2023, 54(8): 241−246.
[11] 李世军,任怀伟,张德生,等. 煤矿巷道冲尘机器人关键技术研究[J]. 工矿自动化,2022,48(12):86−92. LI Shijun, REN Huaiwei, ZHANG Desheng, et al. Research on key technologies of coal mine roadway dust cleaning robot[J]. Journal of Mine Automation, 2022, 48(12): 86−92.
[12] ZHAI G D, ZHANG W T, HU W Y, et al. Coal Mine Rescue Robots Based on Binocular Vision: A Review of the State of the Art[J]. IEEE Access, 2020, 8: 130561−130575. doi: 10.1109/ACCESS.2020.3009387
[13] LI Y utan, LI Menggang, ZHU Hua, et al. Development and applications of rescue robots for explosion accidents in coal mines[J]. Journal of Field Robotics, 2020, 37(3): 466−489. doi: 10.1002/rob.21920
[14] 葛世荣,张晞,薛光辉,等. 我国煤矿煤机智能技术与装备发展研究[J]. 中国工程科学,2023,25(5):146−156. doi: 10.15302/J-SSCAE-2023.05.013 GE Shirong, ZHANG Xi, XUE Guanghui, et al. Development of intelligent technologies and machinery for coal mining in China’s underground coal mines[J]. Strategic Study of CAE, 2023, 25(5): 146−156. doi: 10.15302/J-SSCAE-2023.05.013
[15] 王国法,孟令宇. 煤矿智能化及其技术装备发展[J]. 中国煤炭,2023,49(7):1−13. WANG Guofa, MENG Lingyu. Development of coal mine intelligence and its technical equipment[J]. China Coal, 2023, 49(7): 1−13.
-
期刊类型引用(5)
1. 邓良,晏俊生,李鹏. 基于规则引擎的煤矿透明地质物联网接入系统开发研究. 煤炭技术. 2025(01): 234-237 .  百度学术
百度学术
2. 郭长娜. 煤矿自发电巡检机器人瓦斯断电闭锁系统设计及检测检验方法. 煤矿机械. 2024(06): 23-26 . 百度学术
3. 郭长娜. 煤矿用机器人超速及失稳保护控制系统设计. 煤矿机械. 2024(09): 5-8 . 百度学术
4. 刘洵文,张子扬,徐保庆. 基于ROS的煤矿巷道巡检机器人系统设计. 机电工程技术. 2024(11): 111-115 . 百度学术
5. 戴春雷. 我国矿山智能化研究进展及大模型应用前景. 工矿自动化. 2024(S2): 1-11+22 . 百度学术
其他类型引用(0)





计量
- 文章访问数: 149
- HTML全文浏览量: 32
- PDF下载量: 41
- 被引次数: 5
