
Sludge interface recognition method of coal mine water sump automatic cleaning robot
-
摘要:
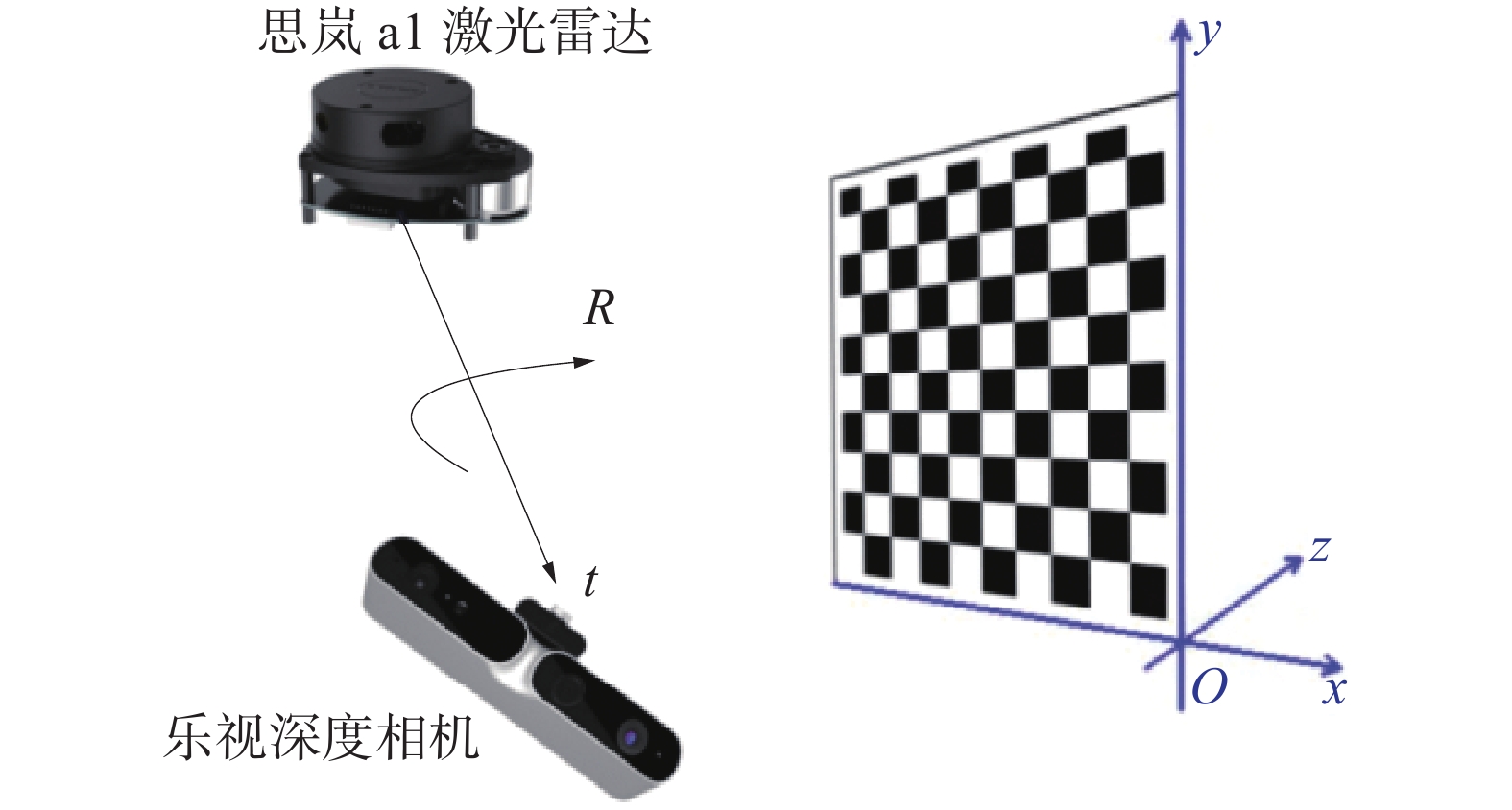
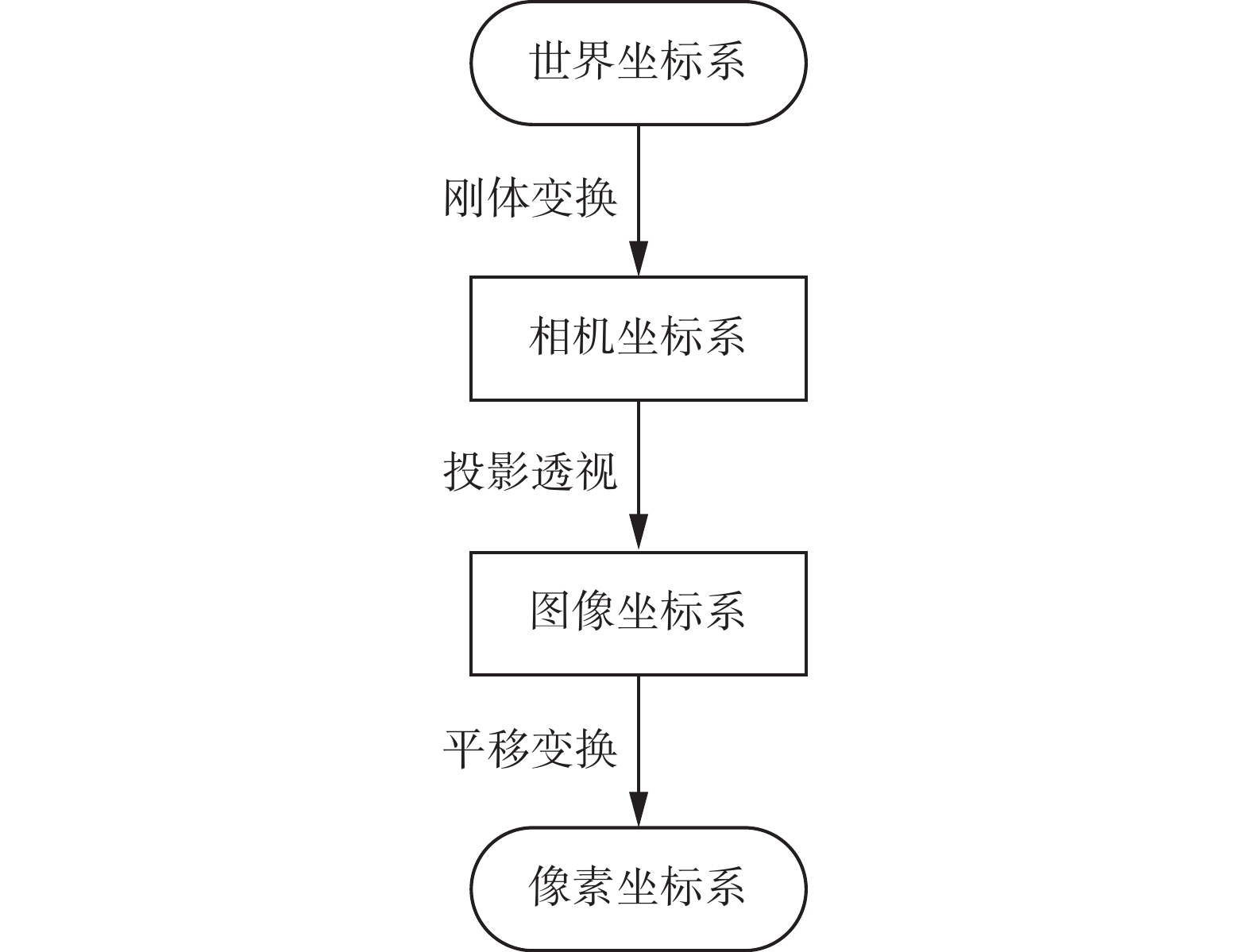
煤矿水仓清淤机器人可以大大提高水仓的清淤效率,保证了水仓的可靠性。在煤矿水仓清淤机器人的研发过程中,煤泥界面的识别成为煤矿水仓清淤机器人研发的关键基础问题,为此,提出了一种二维激光雷达与深度相机结合的方法实现对煤泥界面的准确识别。首先,通过在ROS中对激光雷达和深度相机联合标定的方式获取相机的内部参数和外部参数,建立激光雷达数据和相机数据的变换关系;然后,基于高斯滤波的方式降低深度相机获取的三维点云的噪声,基于均值滤波的方式降低其密度;最后,通过将转换后激光雷达数据与相机数据叠加,通过激光雷达采样点的深度均值对深度相机的三维点云数据进行滤波处理,以实现对煤泥界面的识别。试验结果表明:该方法可以有效识别煤泥界面,为实现水仓清理的智能化、机械化奠定基础。
Abstract:The research and development of the coal mine sump dredging robot can greatly improve the dredging efficiency of the water sump and ensure the reliability of the water sump. In the research and development process of the coal mine water sump dredging robot, the identification of the sludge interface has become a key basic problem in the research and development of the coal mine sump dredging robot, and a method combining 2D lidar and depth camera was proposed to achieve accurate identification of the sludge interface. Firstly, the internal parameters and external parameters of the camera were obtained by the joint calibration of the lidar and the depth camera in ROS, and the transformation relationship between the lidar data and the camera data was established. Then, the noise of the 3D point cloud obtained by the depth camera is reduced by Gaussian filtering, and the density is reduced by means filtering. Finally, by superimposing the converted lidar data with the camera data, the 3D point cloud data of the depth camera was filtered through the depth mean of the lidar sampling points to realize the identification of the sludge interface. Experimental results show that the method can effectively identify the sludge interface, and lay a foundation for the intelligent and mechanized cleaning of water sump.
-
煤储层含气量是煤层气资源勘探测试的关键参数[1-4],也是表征煤储层开发潜力和确保矿井瓦斯安全的关键参数之一[4-11];煤储层含气量测试可为煤层气资源量、储量估算和煤层气开发设计提供重要依据[4]。煤储层含气量测值的不准确性是导致煤层气资源计算出现差异的重要原因[12]。现阶段,我国煤炭资源勘探和煤层气资源勘探开发煤层含气量测试方法主要采用GB/T19559—2021《煤层气含量测定方法》提供的解吸法及其矫正计算方法[13-17],其中损失气量计算采用最初10个地面实测解吸气量数据,由损失气时间与解吸时间和的平方根与累计解吸气量之间线性关系倒推零时间解吸气量得出。
应用上述方法,多年来我国在多个煤层气勘探开发区块获取了大量含气量数据。然而,目前煤层含气量计算仍有以下不足:吸附气欠饱和储层现场含气量测试的可靠性缺乏数值模拟验证,特别是损失气量估算的准确程度尚未有数值模型验证;另外,上述方法对含气饱和储层(吸附气、游离气均饱和,下同)含气量测试的准确性尚不清楚,饱和储层煤心含气量测试过程模拟尚未开展。基于此,选取新疆低煤化煤(本次为长焰煤)煤心为研究对象,构建了储层煤心含气量解吸-扩散数值模型,并通过模型计算分析了吸附气欠饱和与含气饱和储层煤心解吸动态,对比分析了数值模型与现场测试损失气量、解吸气量、残余气量构成的差异性,以期为我国低煤化储层煤层气勘探提供含气性分析新思路。
1. 测试方法
1.1 现场含气量相关测试
按照GB/T 19559—2021《煤层气含量测定方法》国家标准提供的方法,开展自然煤心采样,记录采样及装样时间,开展自然解吸气量连续测试和残余气测试;根据GB/T 19560—2008《煤的高压等温吸附试验方法》、GB/T 212—2008《煤的工业分析方法》等开展煤等温吸附实验和工业分析。现场煤心采样及上述相关工作开展于新疆某长焰煤储层煤层气开发先导试验区,煤心样品为长焰煤(属于低煤化度煤),且煤心对应的实测含气饱和度分别为54.77%、77.51%、99.79%。工业分析及煤岩组分分析成果见表1。
表 1 煤心工业分析及煤岩组分分析成果Table 1. Coal core industrial analysis and coal rock composition analysis results样品编号 直径/mm 长度/cm 宏观煤岩类型 平均镜质组最大反射率/% 水分/% 灰分/% 挥发分/% 镜质组组分/% 惰质组组分/% 壳质组组分/% BF-1 63.0 26.8 半亮煤 0.60 0.90 11.77 43.79 84.2 14.8 1.0 BF-2 60.1 30.0 半亮煤 0.61 0.86 22.08 40.45 79.6 19.4 1.0 BF-3 61.0 34.0 半亮煤 0.67 1.12 13.40 37.17 78.6 25.5 1.0 1.2 储层煤心含气量测试数值模拟流程
1.2.1 假设条件
煤是一种复杂的多孔介质,为了方便求解,通常对煤心样品做出以下假设:①煤屑由球形颗粒组成;②煤颗粒为均质、各向同性体;③CH4解吸-扩散遵从连续性原理;④扩散系数与浓度、时间和坐标无关;⑤煤屑瓦斯解吸为等温条件下的解吸过程;⑥煤心含气量测试过程中孔隙度不变。
1.2.2 控制方程
单位体积吸附气欠饱和储层煤心基质CH4质量可表述为(CH4全部吸附在煤基质表面,在储层压力条件下吸附解吸平衡,孔隙表面外不含游离CH4):
$$ {m}_{\mathrm{m}\mathrm{u}}={\varphi }_{\mathrm{u}\mathrm{n}}(1-{\phi }_{\mathrm{m}})\left(\dfrac{100-{M}_{\mathrm{a}\mathrm{d}}-{A}_{\mathrm{a}\mathrm{d}}}{100}\right)\dfrac{{V}_{\mathrm{L}}{p}_{\mathrm{m}}}{{p}_{\mathrm{m}}+{p}_{\mathrm{L}}}{\rho }_{\mathrm{c}\mathrm{o}\mathrm{a}\mathrm{l}}{\rho }_{\mathrm{s}\mathrm{c}} $$ 式中:mmu为单位体积煤基质中赋存的瓦斯质量,g;φun为欠饱和储层含气饱和度,%;ϕm为基质孔隙度;Mad为空气干燥基水分含量,%;Aad为空气干燥基灰分产率,%;VL为朗缪尔体积,单分子层最大的吸附量,cm3/g;pm为基质孔隙中的CH4压力,MPa;pL为朗缪尔压力,吸附量为最大吸附量1/2时间的吸附平衡压力,MPa;ρcoal为煤视密度,kg/m3;ρsc为标准状态下的CH4密度,g/cm3。
煤心解吸至大气环境控制方程:
$$\begin{array}{c} \dfrac{\partial p}{\partial t}\left({\varphi }_{{\mathrm{un}}}\left(1-{\phi }_{{\mathrm{m}}}\right)\left(\dfrac{100-{{M}}_{\mathrm{a}\mathrm{d}}-{{A}}_{\mathrm{a}\mathrm{d}}}{100}\right)\dfrac{{V}_{{\mathrm{L}}}{p}_{{\mathrm{L}}}}{{\left(p+{p}_{{\mathrm{L}}}\right)}^{2}}{\rho }_{{\mathrm{coal}}}\dfrac{{M}_{{\mathrm{c}}}}{{V}_{{\mathrm{M}}}}\right)=\\ \nabla \left(\dfrac{{M}_{{\mathrm{c}}}}{RT}D\nabla p\right) \end{array} $$ 式中:t为时间,s;p为煤心孔隙气体压力,MPa;Mc为甲烷分子摩尔质量,kg/mol;VM为CH4分子摩尔体积,m3/mol;R为理想气体常数,J/(mol·K);T为煤层温度,K;D为扩散系数,10−9 m2/s。
单位体积饱和储层煤心基质CH4质量可表述为(CH4在煤基质表面吸附饱和,且在储层压力条件下游离CH4充满孔隙):
$$ \begin{array}{c} {m}_{{\mathrm{mo}}}=(1-{\phi }_{{\mathrm{m}}})\left(\dfrac{100-{{M}}_{\mathrm{a}\mathrm{d}}-{{A}}_{\mathrm{a}\mathrm{d}}}{100}\right)\dfrac{{V}_{{\mathrm{L}}}{p}_{{\mathrm{m}}}}{{p}_{{\mathrm{m}}}+{p}_{{\mathrm{L}}}}{\rho }_{{\mathrm{coal}}}{\rho }_{{\mathrm{sc}}}+\\ {\phi }_{{\mathrm{m}}}\dfrac{{M}_{{\mathrm{c}}}}{RT}{p}_{{\mathrm{m}}} \end{array} $$ 式中:mmo为初始条件下单位体积饱和储层煤心基质CH4质量,g。
饱和储层煤心含气饱和度:
$$ {\varphi }_{{\mathrm{m}}}=\dfrac{{m}_{{\mathrm{mo}}}}{(1-{\phi }_{{\mathrm{m}}})\left(\dfrac{100-{{M}}_{\mathrm{a}\mathrm{d}}-{{A}}_{\mathrm{a}\mathrm{d}}}{100}\right)\dfrac{{V}_{{\mathrm{L}}}{p}_{0}}{{p}_{0}+{p}_{{\mathrm{L}}}}{\rho }_{{\mathrm{coal}}}{\rho }_{{\mathrm{sc}}}} $$ 煤心扩散、解吸控制方程:
$$ \begin{array}{c} \dfrac{\partial p}{\partial t}\left(\left(1 - {\phi }_{{\mathrm{m}}}\right)\left(\dfrac{100 - {{M}}_{\mathrm{a}\mathrm{d}} - {{A}}_{\mathrm{d}}}{100}\right)\dfrac{{V}_{{\mathrm{L}}}{p}_{{\mathrm{L}}}}{{\left(p + {p}_{{\mathrm{L}}}\right)}^{2}}{\rho }_{{\mathrm{coal}}}\dfrac{{M}_{{\mathrm{c}}}}{{V}_{{\mathrm{M}}}} + {\phi }_{{\mathrm{m}}}\dfrac{{M}_{{\mathrm{c}}}}{RT}\right) =\\ \nabla \left(\dfrac{{M}_{{\mathrm{c}}}}{RT}D\nabla p\right) \end{array} $$ 1.2.3 几何模型和边界条件
几何模型为实际圆柱体煤心物理模型,几何尺寸与现场测量一致;初始煤心各点孔隙压力为根据煤层气井试井储层压力推算得出,由于解吸时煤心已与大气接触,认为边界条件煤心柱面和断面表面压力为大气压力0.1 MPa。煤心几何模型如图1。
2. 结果与讨论
2.1 欠饱和储层煤心自然解吸测试与数值模拟
采用与煤心参数近似数据开展模拟并拟合解吸体积曲线,还原现场解吸参数和煤样特性参数。储层煤心参数实测值与拟合值对比见表2,煤心xy中心截面单位体积煤心含气性变化如图2。BF-1煤心累计解吸体积与解吸时间关系如图3。
表 2 储层煤心参数实测值与拟合值对比Table 2. Comparison between measured values and fitting values of coal core parameters of reservoir参数 实测值(BF1/BF2/BF3) 拟合值(BF1/BF2/BF3) 误差率/%
(BF1/BF2/BF3)储层压力/ MPa 9.88/9.25/8.96 9.88/9.25/8.96 0/0/0 兰氏压力/ MPa 1.92/2.05/1.65 1.92/2.05/1.65 0/0/0 兰氏体积/
(cm3·g−1)19.23/22.05/15.40 18.60/20.10/13.80 3.28/8.84/10.39 水分含量
(空干基)/%0.90/0.86/1.12 0.93/0.93/1.08 3.33/8.14/3.57 灰分产率
(干燥基)/%11.77/22.08/13.40 11.72/23.18/14.20 0.42/4.98/5.97 煤心密度/
(g· cm−3)1.36/1.44/1.44 1.36/1.44/1.44 0/0/0 孔隙度 0.10/0.09/0.08 0.10/0.08/0.072 0/11.1/10.0 扩散系数/
10−9(m2·s−1)4×10−9/—/— 3.70/1.00/0.80 7.50/—/— 含气
饱和度/%54.77/77.51/99.79 54.77/77.51/99.79 0/0/0 ![]() 图 2 煤心xy中心截面单位体积煤心含气性变化Figure 2. Change of gas content per unit volume of coal core at each position of xy central section of coal core
图 2 煤心xy中心截面单位体积煤心含气性变化Figure 2. Change of gas content per unit volume of coal core at each position of xy central section of coal core由图2可知:解吸开始24 h,含气量快速下降,各时刻煤心中心位置含气量最高而边缘最低。
![]() 图 3 煤心累计解吸体积与解吸时间关系Figure 3. Relationship between cumulative desorption volume and desorption time
图 3 煤心累计解吸体积与解吸时间关系Figure 3. Relationship between cumulative desorption volume and desorption time由图3可知:BF-1扣除损失气时间拟合累计解吸气量(6 427.66 cm3)与现场煤心累计解吸气量(6 346.73 cm3)接近,相差2.00%;未扣损失气时间模拟累计解吸量(7 361.4 cm3)大于上述二者,显示损失气的存在;同理,BF-2和BF-3也有类似结果。
吸附气饱和储层煤心现场解吸与数值模拟含气量构成对比见表3,BF-1、BF-2、BF-3煤心损失气时间(T)与解吸时间(t)和的平方根和解吸初期累计解吸气量回归关系如图4。
表 3 吸附气饱和储层煤心现场解吸与数值模拟含气量构成对比Table 3. Comparison of adsorbed gas saturated reservoirs between on-site desorption and numerical simulation of cores样品 含气饱和度/% 含气量构成 实测体积/cm3 占比/实测/% 拟合体积/cm3 占比(拟合)/% 实测-拟合误差/% BF-1 54.77 损失气 979.43 13.28 880.26 11.95 10.12 解吸气 6 346.73 86.06 6427.66 87.32 2.00 残余气 48.43 0.66 46.24 0.63 4.52 总含气量 7 374.59 100.00 7361.40 100.00 0.18 BF-2 77.51 损失气 823.04 7.80 755.37 7.03 8.22 解吸气 9680.43 91.78 9937.60 92.52 2.66 残余气 43.88 0.42 47.89 0.45 9.14 总含气量 10290.96 100.00 10740.86 100.00 1.83 BF-3 99.79 损失气 793.71 6.36 841.77 6.75 6.06 解吸气 11638.39 93.26 11575.20 92.84 0.54 残余气 47.56 0.38 50.32 0.40 5.80 总含气量 12479.66 100.00 12467.29 100.00 0.10 ![]() 图 4 煤心损失气时间与解吸时间和的平方根和解吸初期累计解吸气量回归关系Figure 4. Linear regression relationship between the square root of the sum of gas loss time and desorption time and cumulative amount of desorbed gas at initial stage of desorption
图 4 煤心损失气时间与解吸时间和的平方根和解吸初期累计解吸气量回归关系Figure 4. Linear regression relationship between the square root of the sum of gas loss time and desorption time and cumulative amount of desorbed gas at initial stage of desorption对于BF-1煤心,现场测试BF-1煤心损失气量结果为979.43 cm3,与数值模拟结果前15 min解吸气量(880.26 cm3)(图4(a))接近。现场BF-1煤心解吸气量和残余气量与数值模型计算的解吸气量和残余气量也较接近。
BF-2和BF-3煤心现场测试煤心损失气量结果分别为823.04、793.71 cm3,略低于与数值模拟结果前15 min解吸气量(952.40、1015.80 cm3) (图4(b)、图4(c)),说明吸附气饱和度较高煤心解吸初期损失气量时间平方根法计算结果可能略偏小。这可能是吸附气饱和度较高,煤心内CH4浓度高,扩散作用更显著导致。用损失气时间与解吸时间和的平方根与解吸初期累计解吸气量的线性回归关系计算BF-2和BF-3煤心损失气量,发现基于数值模拟计算的损失气量结果(755.37、841.77 cm3)与基于现场实测的损失气量计算结果(832.04、793.71 cm3)较为接近。说明基于数值模拟数据利用时间平方根法计算的损失气量与实测时间平方根法估算的损失气量较为接近。
现场实测BF-1、BF-2和BF-3煤心解吸气量和残余气量与数值模型计算出的解吸气量和残余气量也较为接近,误差不超过10.12%(表3)。说明数值模型可以近似反映吸附气欠饱和储层煤心真实解吸过程和损失气量、解吸气量、残余气量特征。
2.2 饱和储层煤心含气量测试与数值模拟
以BF-1煤心为例,采用现场实测参数数据(表2),假设煤心处于饱和状态(即吸附气饱和、游离气在储层压力条件下充满孔隙也达到饱和状态),对现阶段现场含气量测试难度较大的含气饱和煤心解吸-扩散过程进行模拟。含气饱和煤心xy中心截面各位置单位体积煤心含气性变化如图5。
![]() 图 5 含气饱和煤心xy中心截面各位置单位体积煤心含气性变化Figure 5. Change of gas content per unit volume of coal core at each position of xy center section of gas bearing saturated coal core
图 5 含气饱和煤心xy中心截面各位置单位体积煤心含气性变化Figure 5. Change of gas content per unit volume of coal core at each position of xy center section of gas bearing saturated coal core由图5可知:解吸前24 h煤心含气量快速下降,各时刻煤心中心位置含气量最高而煤心边缘含气量最低。
损失气时间与解吸时间和的平方根和累计解吸气量的线性回归关系如图6。饱和储层煤心解吸-扩散数值模拟含气量构成预测见表4。
![]() 图 6 损失气时间与解吸时间和的平方根和累计解吸气量的线性回归关系Figure 6. Linear regression relationship between the square root of the sum of gas loss time and desorption time and cumulative amount of desorbed gas表 4 饱和储层煤心解吸-扩散数值模拟含气量构成预测Table 4. Prediction of gas content composition of coal core desorption-diffusion numerical simulation in saturated core
图 6 损失气时间与解吸时间和的平方根和累计解吸气量的线性回归关系Figure 6. Linear regression relationship between the square root of the sum of gas loss time and desorption time and cumulative amount of desorbed gas表 4 饱和储层煤心解吸-扩散数值模拟含气量构成预测Table 4. Prediction of gas content composition of coal core desorption-diffusion numerical simulation in saturated core含气量构成 预测体积/cm3 占比/% 损失气 3 792.50 18.64 解吸气 16 460.70 80.90 残余气 93.51 0.46 总含气量 20 346.71 100.00 数值模拟显示,损失气时间内(15 min)假设的饱和煤心解吸-扩散气量达到4 441.3 cm3,相同损失气时间的情况下,约为相应吸附气欠饱和储层煤心此时间段解吸气量(即本例损失气量)的4倍。
损失气时间与解吸时间和的平方根与解吸初期累计解吸气量的线性回归关系截距为正数(R2=0.9988),暗示采用解吸时间平方根与解吸初期累计解吸气量线性回归方法并不适用于饱和煤心损失气量的估算;采用解吸时间平方根与解吸初期累计解吸气量多项式回归方法,计算得煤心损失气量仅为433.11 cm3(R2=0.9988),甚至小于吸附气欠饱和储层煤心损失气量估算值,说明基于时间平方根与累计解吸气量的相关性分析方法可能无法准确估算损失气量。同时测试初期时间平方根与累计解吸气量的回归关系(图6蓝色标记)和损失气时间与累计气量的回归关系(图6红色标记,实测测不出部分)也存在较大差异,说明饱和煤心损失气时间解吸-扩散规律较为复杂,常规回归分析法可能难以实现对损失气量的准确估算。
由表4可知:饱和煤心损失气、解吸气、残余气占比分别为18.64%、80.90%、0.46%,其损失气占比高于吸附气欠饱和煤心损失气占比、解吸气占比低于吸附气欠饱和煤心解吸气占比。
数值模型可以近似反映吸附气欠饱和储层煤心真实解吸过程和损失气量、解吸气量、残余气量特征。目前,含气量现场测试手段很难达到对饱和煤心含气量的准确测试和估算,希望通过数值模拟为含气饱和煤心含气量分析提供思路。
3. 结 语
1)构建的吸附气欠饱和煤心解吸数值模型计算的损失气量、解吸气量和残余气量与现场测试相应结果接近(误差<10.12%),可近似反映吸附气欠饱和储层煤心含气量构成。
2)对于构建的含气饱和储层煤心数值模型,损失气时间与解吸时间和的平方根与解吸初期累计解吸气量的回归分析法预测损失气量误差较大。饱和煤心损失气时间解吸-扩散规律较为复杂,常规回归分析可能难以实现对损失气的准确估算。
3)相同损失气时间条件下,本例饱和煤心损失气总含气量占比(18.64%)高于吸附气欠饱和煤心损失气占比(11.95%),饱和煤心解吸气占比(80.90%)低于吸附气欠饱和煤心解吸气占比(87.32%),饱和煤心残余气占比(0.46%)低于吸附气欠饱和煤心残余气占比(0.63%)。
-
[1] 史万明,朱兴民,刘传令,等. 水仓煤泥清挖和处理的新工艺及设备[J]. 煤矿机械,2009,30(9):146−148. SHI Wanming, ZHU Xingmin, LIU Chuanling, et al. Technology and equipment for cleaning coal slime in mine coal water warehouse[J]. Coal Mine Machinery, 2009, 30(9): 146−148.
[2] 石军杰,高贵军,游青山,等. 煤矿井下水仓清理机器人系统设计与应用[J]. 煤炭工程,2022,54(11):205−208. SHI Junjie, GAO Guijun, YOU Qingshan, et al. Water bin cleaning robot system for underground coal mine[J]. Coal Engineering, 2022, 54(11): 205−208.
[3] 孙继平. 煤矿信息化与自动化发展趋势[J]. 工矿自动化,2015,41(4):1−5. SUN Jiping. Development trend of coal mine informatization and automation[J]. Industry and Mine Automation, 2015, 41(4): 1−5.
[4] 梁秀满,田童,刘文涛,等. 基于泡沫图像特征融合的煤泥浮选工况识别[J]. 计算机仿真,2021,38(4):385−389. LIANG Xiuman, TIAN Tong, LIU Wentao, et al. Coal slime flotation condition identification based on fusion of froth image features[J]. Computer Simulation, 2021, 38(4): 385−389.
[5] 刘文礼,路迈西,王凡,等. 煤泥浮选泡沫图像纹理特征的提取及泡沫状态的识别[J]. 化工学报,2003,54(6):830−835. LIU Wenli, LU Maixi, WANG Fan, et al. Extraction of textural feature and recognition of coal flotation froth[J]. CIESC Journal, 2003, 54(6): 830−835.
[6] 王军,苏剑波,席裕庚. 多传感器融合综述[J]. 数据采集与处理,2004,19(1):72−77. WANG Jun, SU Jianbo, XI Yugeng. Summary of multisensor fusion[J]. Journal of Data Acquisition and Processing, 2004, 19(1): 72−77.
[7] 罗亮,谈莉斌,余晓流,等. 一种融合二维激光雷达和RGB-D相机的移动机器人建图方法研究[J]. 制造业自动化,2023,45(4):137−140. LUO Liang, TAN Libin, YU Xiaoliu, et al. Research on a mobile robot mapping method based on the fusion of 2D LIDAR and RGB-D camera[J]. Manufacturing Automation, 2023, 45(4): 137−140.
[8] 薛培林,吴愿,殷国栋,等. 基于信息融合的城市自主车辆实时目标识别[J]. 机械工程学报,2020,56(12):165−173. doi: 10.3901/JME.2020.12.165 XUE Peilin, WU Yuan, YIN Guodong, et al. Real-time target recognition for urban autonomous vehicles based on information fusion[J]. Journal of Mechanical Engineering, 2020, 56(12): 165−173. doi: 10.3901/JME.2020.12.165
[9] 宋蕊,吴琛. 基于改进DBSCAN和双边滤波算法的点云去噪[J]. 电子器件,2023,46(4):1083−1088. SONG Rui, WU Chen. Point cloud denoising based on improved DBSCAN and bilateral filtering[J]. Chinese Journal of Electron Devices, 2023, 46(4): 1083−1088.
[10] Rusu R B, Cousins S. 3D is here: point cloud library ( PCL)[C] //2011 EEE International Conference on Robotics and Automation. IEEE, 2011: 1−4.
[11] 肖俊,石光田. 三维点云去噪技术[J]. 中国科学院大学学报,2023,40(5):577−595. XIAO Jun, SHI Guangtian. Three-dimensional point cloud denoising[J]. Journal of University of Chinese Academy of Sciences, 2023, 40(5): 577−595.
[12] 庆鹏程,陈昆山. 基于点云处理技术的汽车车身尺寸获取研究[J]. 科学技术与工程,2014,14(23):261−264. doi: 10.3969/j.issn.1671-1815.2014.23.050 QING Pengcheng, CHEN Kunshan. Research on obtaining the vehicle body size based on point cloud data processing technology[J]. Science Technology and Engineering, 2014, 14(23): 261−264. doi: 10.3969/j.issn.1671-1815.2014.23.050
[13] 邹鹏,李蓓智,龚菊贤,等. 改进的RANSAC点云分割算法及其应用[J]. 机械设计与制造,2020(11):121−124. ZOU Peng, LI Beizhi, GONG Juxian, et al. Improved RANSAC point cloud segmentation algorithm and its application[J]. Machinery Design & Manufacture, 2020(11): 121−124.
[14] 肖正涛,高健,吴东庆,等. 一种基于体素网格的三维点云均匀降采样方法[J]. 机械设计与制造,2023(8):180−184. doi: 10.3969/j.issn.1001-3997.2023.08.037 XIAO Zhengtao, GAO Jian, WU Dongqing, et al. A uniform downsampling method for three-dimensional point clouds based on voxel grids[J]. Machinery Design & Manufacture, 2023(8): 180−184. doi: 10.3969/j.issn.1001-3997.2023.08.037
[15] 雷志秋,张同刚,刘晓华,等. 盾构隧道点云典型要素分割[J]. 测绘科学技术学报,2018,35(4):395−399. LEI Zhiqiu, ZHANG Tonggang, LIU Xiaohua, et al. Typical elements segmentation of shield tunnel point cloud[J]. Journal of Geomatics Science and Technology, 2018, 35(4): 395−399.
[16] SAYED A, LBRAHIM A. Recent developments in systematic sampling: a re-view [J]. Journal of Statistical Theory and Practice, 2018, 12(2): 290−310.
 下载:
下载:










计量
- 文章访问数: 27
- HTML全文浏览量: 2
- PDF下载量: 4
